 手机店铺
手机店铺
 微信公众号
微信公众号

服务热线
0371-56619755 0371-56619756
182 3756 3366


该系统具有易扩展、抗干扰等特性。
通常情况下,机器人的控制需要计算机“大脑”的系统调配,因而当涉及群体协作,机器人与机器人之间的配合就需要计算机系统统一的调控,但是因为需要集中控制,在复杂协作任务的执行上,现有的机器人集群系统显得吃力。
为了改进系统的扩展性能和灵活性,美国哈佛大学研究员李曙光和哥伦比亚大学研究员Richa Batra及同事共同设计了一款极简系统,它可以模拟生物细胞集体迁移,实现了复杂任务的精准模拟。3月20日,这一工程学最新成果在《自然》杂志上得到发表。
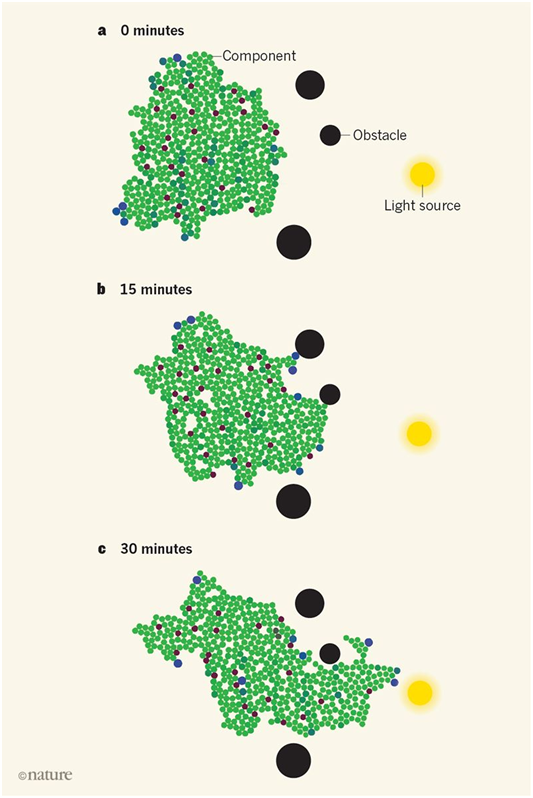
据悉,在单个机器人的设计上,研究人员选择简单的“盘状”造型,它们由“粒子”构成,且不能做平面移动,只可像相机光圈一般做伸缩运动。但当它们聚集一起后,研究人员只要给它们光线刺激,整个系统就会对这一信号做出响应,并按照偏移模式振荡,集体朝着刺激源移动。

实验中,研究团队用25个机器人现场演示了这一集群在移动、搬运物体等各方面的能力,同时模拟测试了10万个机器人的表现,以展示它们的可扩展性。
值得一提的是,不同于传统机器人系统,通过模拟测试研究人员发现这一系统在20%个机器人失效的情况下,依然能够继续运动并完成任务。对此,德国马克斯•普朗克智能系统研究所科学家评价道,这种全新机器人具有传统机器人系统所没有的可扩展控制和鲁棒性——这是一种抗干扰能力参数,也是在异常和危险情况下系统生存的关键。
亿宏磨具中文官网 版权所有 备案号:豫ICP备18019016号-2 技术支持:河南亿宏世纪网络有限公司 网站地图
